Author: Yash Bansod
Date: 30th January, 2020
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
clc;
Define some initial parameters
% Define the origin coordinates
o_x = 0;
o_y = 0;
o_z = 0;
% Define the rotation across various axes
theta_x = 30;
theta_y = 30;
theta_z = 30;
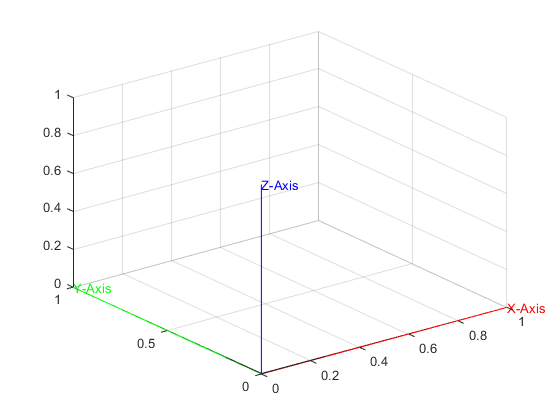
Plot the Reference frame
% Plot X axis
X = plot3([o_x, o_x + 1], [o_y, o_y], [o_z, o_z], '-', 'color', 'red');
grid on;
hold on;
% Plot Y axis
Y = plot3([o_x, o_x], [o_y, o_y + 1], [o_z, o_z], '-', 'color', 'green');
% Plot Z axis
Z = plot3([o_x, o_x], [o_y, o_y], [o_z, o_z + 1], '-', 'color', 'blue');
% Add text tags to the ends of the axes
text_x = text(o_x + 1, o_y, o_z, 'X-Axis', 'color', 'red');
text_y = text(o_x, o_y + 1, o_z, 'Y-Axis', 'color', 'green');
text_z = text(o_x, o_y, o_z + 1, 'Z-Axis', 'color', 'blue');
Calculate the rotation matrix
% Counter-Clockwise Rotation across X axis
Rx = [ 1, 0 , 0;
0, cosd(theta_x), -sind(theta_x);
0, sind(theta_x), cosd(theta_x)];
% Couter-Clockwise Rotation across Y axis
Ry = [ cosd(theta_y), 0, -sind(theta_y);
0, 1, 0;
sind(theta_y), 0, cosd(theta_y)];
% Couter-Clockwise Rotation across Z axis
Rz = [ cosd(theta_z), -sind(theta_z), 0;
sind(theta_z), cosd(theta_z), 0;
0, 0, 1];
Calculate Overall Rotation matrix
% Rotation Matrix 1 = Rotation across X followed by Y followed by Z axis
R_1 = Rz * Ry * Rx;
% Rotation Matrix 2 = Rotation across Z followed by Y followed by X axis
R_2 = Rx * Ry * Rz;
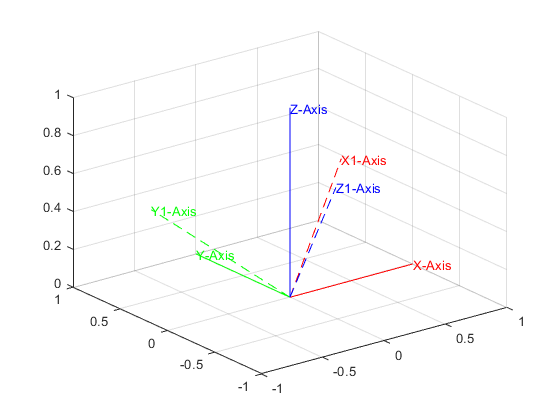
Plot the Frame after applying Rotation Matrix 1 to Reference Frame
X_1 = plot3([o_x, o_x + R_1(1, 1)], [o_y, o_y + R_1(2, 1)], [o_z, o_z + R_1(3, 1)], '--', 'color', 'red');
Y_1 = plot3([o_x, o_x + R_1(1, 2)], [o_y, o_y + R_1(2, 2)], [o_z, o_z + R_1(3, 2)], '--', 'color', 'green');
Z_1 = plot3([o_x, o_x + R_1(1, 3)], [o_y, o_y + R_1(2, 3)], [o_z, o_z + R_1(3, 3)], '--', 'color', 'blue');
text_x_1 = text(o_x + R_1(1, 1), o_y + R_1(2, 1), o_z + R_1(3, 1), 'X1-Axis', 'color', 'red');
text_y_1 = text(o_x + R_1(1, 2), o_y + R_1(2, 2), o_z + R_1(3, 2), 'Y1-Axis', 'color', 'green');
text_z_1 = text(o_x + R_1(1, 3), o_y + R_1(2, 3), o_z + R_1(3, 3), 'Z1-Axis', 'color', 'blue');
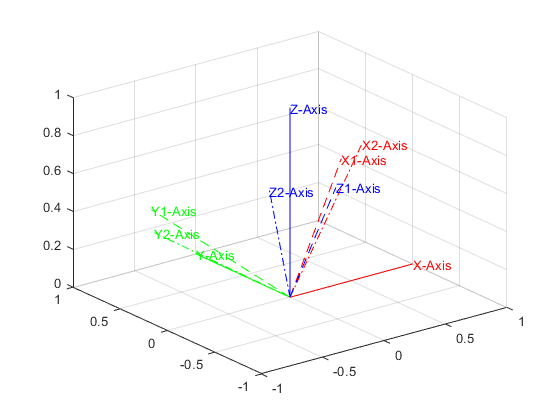
Plot the Frame after applying Rotation Matrix 2 to Reference Frame
X_2 = plot3([o_x, o_x + R_2(1, 1)], [o_y, o_y + R_2(2, 1)], [o_z, o_z + R_2(3, 1)], '-.', 'color', 'red');
Y_2 = plot3([o_x, o_x + R_2(1, 2)], [o_y, o_y + R_2(2, 2)], [o_z, o_z + R_2(3, 2)], '-.', 'color', 'green');
Z_2 = plot3([o_x, o_x + R_2(1, 3)], [o_y, o_y + R_2(2, 3)], [o_z, o_z + R_2(3, 3)], '-.', 'color', 'blue');
text_x_2 = text(o_x + R_2(1, 1), o_y + R_2(2, 1), o_z + R_2(3, 1), 'X2-Axis', 'color', 'red');
text_y_2 = text(o_x + R_2(1, 2), o_y + R_2(2, 2), o_z + R_2(3, 2), 'Y2-Axis', 'color', 'green');
text_z_2 = text(o_x + R_2(1, 3), o_y + R_2(2, 3), o_z + R_2(3, 3), 'Z2-Axis', 'color', 'blue');