Author: Yash Bansod
GitHub: https://github.com/YashBansod
This is the main program.
Clear the environment and the command line
clear;
clc;
close all;
Add the directory containing relevant functions to the path variables
addpath('./INV-functions/')
Define the input parameters and simulate
% Set the length of the links of the manipulator robot.
L1 = 5;
L2 = 5;
% This function will take desired end-effector position from user via mouse
% pointer. Select a point using the mouse and then press Enter.
% [expPoint, Joint] = INV_KIN_2DOF(L1,L2);
% Alternatively, user can choose to pass the desired end-effector position
% directly as absolute coordinates too.
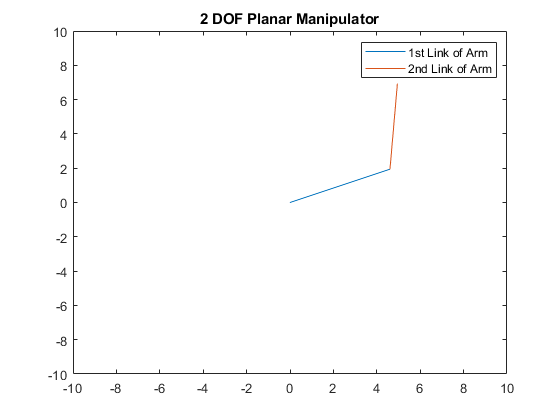
expX = 5;
expY = 7;
[expPoint, Joint] = INV_KIN_2DOF(L1, L2, expX, expY);
fprintf("The final end effector position is (%0.2f, %0.2f)\n", expPoint);
[m, n] = size(Joint);
currPoint = [Joint(m,1); Joint(m,2)];
dist = sqrt((expPoint(1,1) - currPoint(1,1))^2 + ...
(expPoint(2,1)-currPoint(2,1))^2 );
msgbox('Operation Complete')
Results
 |
 |
The selected point for end effector is (5.00, 7.00) The final end effector position is (5.00, 7.00)
 |
 |