Markov Processes
Problem 1a - Markov Birth-Death Process
Problem Statement:
Consider a population of micro-organisms that can grow under certain favorable physical condition and similarly the population decrease under hostile situation. Also consider that due to space restriction the maximum number of members in the population could be N (and 0 as minimum). Let us denote the population size at time t by X_t. So, at any time t, X_t will be one of the numbers from {0, 1, …, N}. The population growth (or death) rate depends on the current population size as follows:
p_(n, n+1) = P(X_(t+1)=n+1│X_t=n) = λ_n
p_(n, n-1) = P(X_(t+1)=n-1│X_t=n) = μ_n
p_(n, n) = P(X_(t+1)=n│X_t=n) = 1 - λ_n - μ_n
λ_N = μ_0 = 0
Where P(X_(t+1)=n+1│X_t=n) is the probability that the population will increase by one in one time step.

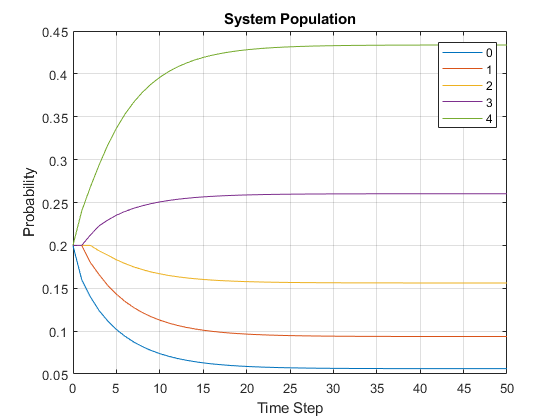
a. Let us consider N=4, λ_n=0.5, μ_n=0.3 for all n=0,1,2,…N along with the condition λ_N = μ_0 = 0 (i.e. probabilities do not depend on the population size), and the initial probabilities at time t=0 are given as p_0(0) = p_1(0) = p_2(0) = p_3(0) = p_4(0) = 0.2 (uniformly distributed). Find (using MATLAB) p_n(t) for all n=0,1,…, N for t=1,2,…,50 and plot each p_n(t) with time t.
MATLAB Code: problem_1a.m
Author: Yash Bansod
Date: 26th March, 2020
Problem 1a - Markov Birth-Death Process
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
clc;
close all;
Define the input parameters
num_time_steps = 50; % Number of time steps
state_vec_size = 5; % N + 1; N = Maximum Population
states = {'0', '1', '2', '3', '4'}; % State Labels
assert(size(states, 2) == state_vec_size);
% Construct the birth rate vector. Vector is used to keep our code
% adaptable to varying birth rates for different states
birth_rate = 0.5;
birth_rate_vec = zeros(1, state_vec_size);
birth_rate_vec(1:end - 1) = birth_rate;
% Construct the death rate vector. Vector is used to keep our code
% adaptable to varying death rates for different states
death_rate = 0.3;
death_rate_vec = zeros(1, state_vec_size);
death_rate_vec(2:end) = death_rate;
% Construct the state matrix where each row represents the state vector at
% time step = row_index - 1
state_mat = zeros(num_time_steps + 1, state_vec_size);
state_mat(1, :) = 1/state_vec_size; % Define the initial state vector
% Construct the state transition matrix
transition_mat = zeros(state_vec_size, state_vec_size);
for row_ind = 1:state_vec_size
for col_ind = 1:state_vec_size
if col_ind == row_ind - 1
transition_mat(row_ind, col_ind) = death_rate_vec(row_ind);
elseif col_ind == row_ind
transition_mat(row_ind, col_ind) = 1 - ...
(birth_rate_vec(row_ind) + death_rate_vec(row_ind));
elseif col_ind == row_ind + 1
transition_mat(row_ind, col_ind) = birth_rate_vec(row_ind);
end
end
end
Compute the state vector at each time step
for time_step = 2:num_time_steps+1
state_mat(time_step, :) = state_mat(time_step - 1, :) * transition_mat;
end
% Sanity Check
transition_mat_ss = transition_mat^num_time_steps;
state_mat_ss = state_mat(1, :) * transition_mat_ss;
assert(all((state_mat_ss - state_mat(end, :)) < 1e-10));
Plot the results
time_line = 0:num_time_steps;
plot(time_line, state_mat(:, 1));
hold on;
for state_vec_ind = 2:state_vec_size
plot(time_line, state_mat(:, state_vec_ind));
end
hold off;
legend(states);
title('System Population');
xlabel('Time Step');
ylabel('Probability');
grid on;
Problem 1b - Markov Birth-Death Process
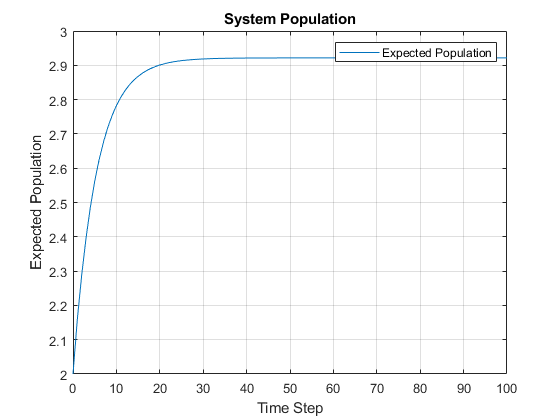
b. Find the expected size of the population, E[X_t], for times t=0,1,2,…,100 and plot it. [Hint: if X is a random variable that takes values from x_1, x_2, …, x_m with probabilities p_1, p_2, …, p_m respectively then E[X] = ∑ x_i p_i].
MATLAB Code: problem_1b.m
Author: Yash Bansod
Date: 26th March, 2020
Problem 1b - Markov Birth-Death Process
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
clc;
close all;
Define the input parameters
num_time_steps = 100; % Number of time steps
state_vec_size = 5; % N + 1; N = Maximum Population
% Construct the birth rate vector. Vector is used to keep our code
% adaptable to varying birth rates for different states
birth_rate = 0.5;
birth_rate_vec = zeros(1, state_vec_size);
birth_rate_vec(1:end - 1) = birth_rate;
% Construct the death rate vector. Vector is used to keep our code
% adaptable to varying death rates for different states
death_rate = 0.3;
death_rate_vec = zeros(1, state_vec_size);
death_rate_vec(2:end) = death_rate;
% Construct the state matrix where each row represents the state vector at
% time step = row_index - 1
state_mat = zeros(num_time_steps + 1, state_vec_size);
state_mat(1, :) = 1/state_vec_size; % Define the initial state vector
% Construct the state transition matrix
transition_mat = zeros(state_vec_size, state_vec_size);
for row_ind = 1:state_vec_size
for col_ind = 1:state_vec_size
if col_ind == row_ind - 1
transition_mat(row_ind, col_ind) = death_rate_vec(row_ind);
elseif col_ind == row_ind
transition_mat(row_ind, col_ind) = 1 - ...
(birth_rate_vec(row_ind) + death_rate_vec(row_ind));
elseif col_ind == row_ind + 1
transition_mat(row_ind, col_ind) = birth_rate_vec(row_ind);
end
end
end
Compute the state vector at each time step
for time_step = 2:num_time_steps+1
state_mat(time_step, :) = state_mat(time_step - 1, :) * transition_mat;
end
% Sanity Check
transition_mat_ss = transition_mat^num_time_steps;
state_mat_ss = state_mat(1, :) * transition_mat_ss;
assert(all((state_mat_ss - state_mat(end, :)) < 1e-10));
expected_population_size = sum((0:state_vec_size-1) .* state_mat, 2);
Plot the results
time_line = 0:num_time_steps;
plot(time_line, expected_population_size);
legend('Expected Population');
title('System Population');
xlabel('Time Step');
ylabel('Expected Population');
grid on;
Problem 1c - Markov Birth-Death Process
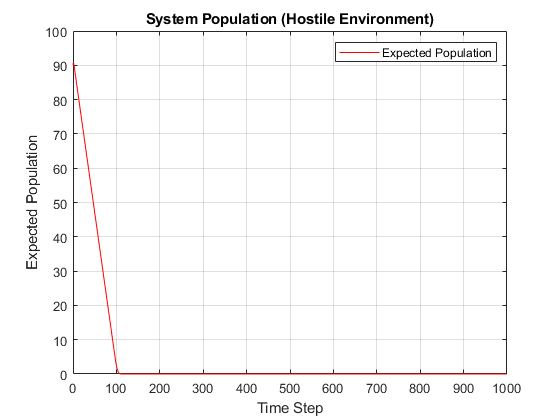
a. Now consider that a hostile situation has occurred that decreases the probability of growth with time and increases probability of death with time as given below:
p_(n, n+1) = P(X_(t+1)=n+1│X_t=n) = 0.9e^(-2t)
p_(n, n-1) = P(X_(t+1)=n-1│X_t=n) = 0.9(1-e^(-2t))
p_(n, n) = P(X_(t+1)=n│X_t=n) = 1 - p_(n, n+1) - p_(n, n-1)
λ_N = μ_0 = 0
Under this situation, it is expected that the population size will decrease. Take N=100, initial population is 90, and plot E[X_t] for t=0,1,2,…,1000. Does E[X_t] converge to zero?
MATLAB Code: problem_1c.m
Author: Yash Bansod
Date: 26th March, 2020
Problem 1c - Markov Birth-Death Process
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
clc;
close all;
Define the input parameters
num_time_steps = 1000; % Number of time steps
state_vec_size = 101; % N + 1; N = Maximum Population
% Construct the state matrix where each row represents the state vector at
% time step = row_index - 1
state_mat = zeros(num_time_steps + 1, state_vec_size);
state_mat(1, 91) = 1; % Define the initial state vector
time_step = 0;
exp_factor = exp(-2 * time_step);
% Define the birth rate
birth_rate_coeff = 0.9;
birth_rate = birth_rate_coeff * exp_factor;
% Define the death rate
death_rate_coeff = 0.9;
death_rate_1 = death_rate_coeff;
death_rate_2 = death_rate_coeff * exp_factor;
% death_rate = death_rate_1 - death_rate_2;
% Define the no state change rate
no_change_rate = 0.1;
Some pre-computations to calculate the state transition matrix
% Precomputations for calculating the state transition matrix
identity_mat = eye(state_vec_size, state_vec_size);
birth_rate_mat_0 = circshift(identity_mat, -1);
birth_rate_mat_0(end, 1) = 0;
% birth_rate = birth_rate_coeff * exp_factor;
death_rate_mat_0 = circshift(identity_mat, 1);
death_rate_mat_0(1, end) = 0;
death_rate_mat_1 = death_rate_mat_0 .* death_rate_1;
% death_rate_mat_2 = death_rate_mat_0 .* death_rate_2;
% death_rate_mat = death_rate_mat_1 - death_rate_mat_2;
no_change_mat = identity_mat .* no_change_rate;
transition_mat = zeros(state_vec_size, state_vec_size, num_time_steps);
% transition_mat(:, :, time_step) = no_change_mat + ...
% death_rate_mat + birth_rate_mat;
Compute the state vector at each time step
for time_step = 1:num_time_steps
exp_factor = exp(-2 * (time_step -1));
birth_rate = birth_rate_coeff * exp_factor;
death_rate_2 = death_rate_coeff * exp_factor;
birth_rate_mat = birth_rate_mat_0 .* birth_rate;
death_rate_mat_2 = death_rate_mat_0 .* death_rate_2;
death_rate_mat = death_rate_mat_1 - death_rate_mat_2;
% no_change_mat is modified to correct the edge conditions
no_change_mat(1, 1) = 1 - birth_rate_mat(1, 2);
no_change_mat(end, end) = 1 - death_rate_mat(end, end - 1);
transition_mat(:, :, time_step) = no_change_mat + ...
death_rate_mat + birth_rate_mat;
state_mat(time_step + 1, :) = state_mat(time_step, :) * ...
transition_mat(:, :, time_step);
end
expected_population_size = sum((0:state_vec_size-1) .* state_mat, 2);
Plot the results
time_line = 0:num_time_steps;
figure(1);
plot(time_line, expected_population_size, 'r');
legend('Expected Population');
title('System Population (Hostile Environment)');
xlabel('Time Step');
ylabel('Expected Population');
grid on;
Auxiliary Plots
ss_ind = 120;
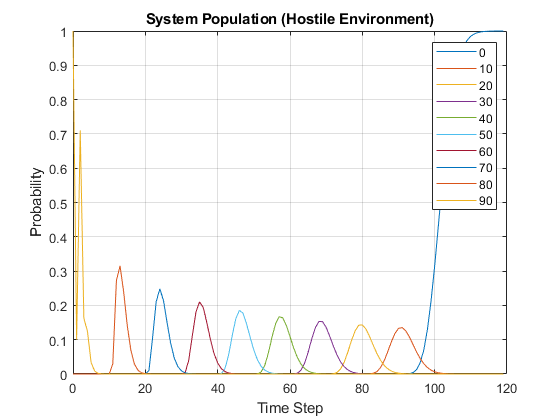
plot_states = {'0', '10', '20', '30', '40', '50', '60', '70', '80', '90'};
figure(2);
plot(time_line(1:ss_ind), ...
state_mat(1:ss_ind, str2double(plot_states(1)) + 1));
hold on;
for index = 2:size(plot_states, 2)
plot(time_line(1:ss_ind), state_mat(1:ss_ind, ...
str2double(plot_states(index)) + 1));
end
hold off;
legend(plot_states);
title('System Population (Hostile Environment)');
xlabel('Time Step');
ylabel('Probability');
grid on;
Problem 2 - Estimating parameters of a Markov Chain
Problem Statement:
In this problem you will develop a program that takes as input a time sequence of a Markov Chain transitions and outputs the transition probability matrix P. Recall that transition probability entries are estimated by the following empirical rule:
P_ij = n_ij/n_i
where n_ij is the number of transitions from state i to state j and n_i is the total number of transitions from state i to any state (including itself) in the given data sequence. For example, if the given data is AABAACBCBCACB where {A, B, C} are the set of the states, then P_AC=2/5, P_BC=2/3 and P_CC=0 etc.
MATLAB Code: problem_2.m
Author: Yash Bansod
Date: 26th March, 2020
Problem 2 - Estimating parameters of a Markov Chain
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
close all;
clc;
Define the input parameters
state_sequence = [1 2 4 12 4 4 2 12];
% state_sequence = [2 3 2 2 2 1 3 1 3 1 2 2 3 1 3 3 2 2 2 1 2 2 3 3 2 2 3 ...
% 2 2 3 3 2 2 2 1 1 2 1 3 1 1 1 1 2 1 3 2 1 3 3];
% state_sequence = "a b a c d a b d a c d b a a b d";
% Preprocessing to convert sting input to string array
if all(class(state_sequence) == 'string')
state_sequence = state_sequence.split(' ')';
end
seq_len = size(state_sequence, 2);
unique_states = unique(state_sequence);
num_states = size(unique_states, 2);
state_map_ind = containers.Map(unique_states, 1:num_states);
% Convert unique states array to cell array of strings
if all(class(state_sequence) == 'double')
states = strsplit(int2str(unique_states));
else
states = cellstr(unique_states);
end
Calculate the Transition Probability Matrix
transition_count_mat = zeros(num_states, num_states);
for seq_ind = 1:seq_len - 1
from_state = state_sequence(seq_ind);
to_state = state_sequence(seq_ind + 1);
from_index = state_map_ind(from_state);
to_index = state_map_ind(to_state);
transition_count_mat(from_index, to_index) = ...
transition_count_mat(from_index, to_index) + 1;
end
assert(sum(transition_count_mat, 'all') == seq_len - 1);
transition_probability_mat = transition_count_mat ./ ...
sum(transition_count_mat, 2);
transition_probability_table = array2table(transition_probability_mat, ...
'rowNames', states, 'VariableNames' , states);
Print the Results
disp('Transition Probability Table:');
disp(transition_probability_table);
Transition Probability Table:
| 1 | 2 | 4 | 12 | |
| 1 | 0 | 1 | 0 | 0 |
| 2 | 0 | 0 | 0.5 | 0.5 |
| 4 | 0 | 0.333 | 0.333 | 0.333 |
| 12 | 0 | 0 | 1 | 0 |
Problem 3a - Simulating a Markov Chain using Monte Carlo
Problem Statement:
By simulating a Markov chain we mean the Monte Carlo simulation discussed in the class where the input will be the transition probability matrix (P) and the initial state (s_0) and number of transitions (N), and the output will be a sequence of length N+1 of states in that Markov chain.
Note that here we want a time evolution of states not the distribution (π_t or p_t^n) over the time.
MATLAB Code: problem_3a.m
Author: Yash Bansod
Date: 26th March, 2020
Problem 3a - Simulating a Markov Chain using Monte Carlo
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
close all;
clc;
Define the input parmeters
states = {'a', 'b'};
num_states = size(states, 2);
% transition_mat = [0.5 0.5; 0.5 0.5];
% transition_mat = [0 1; 1 0];
transition_mat = [0.3 0.7; 0.6 0.4];
assert(size(transition_mat, 1) == num_states);
assert(size(transition_mat, 2) == num_states);
init_state = 'a';
% num_transitions = 10;
num_transitions = 200;
Monte Carlo Simulation to generate Markov Chain
% Map state names to indices
state_map_ind = containers.Map(states, 1:num_states);
% create a cell array for holding generated state sequence
state_seq = cell(1, num_transitions + 1);
state_seq{1} = init_state;
trans_mat_cumsum = cumsum(transition_mat, 2); % Compute thresholds
rand_draw = rand(1, num_transitions); % Random numbers sampled
% Next State is selected based on random draw and computed thresholds
for t_index = 1:num_transitions
state_cumsum = trans_mat_cumsum(state_map_ind(state_seq{t_index}), :);
for s_index = 1:num_states
if rand_draw(t_index) <= state_cumsum(s_index)
state_seq(t_index + 1) = states(s_index);
break;
end
end
end
string_state_seq = string(strjoin(state_seq));
Print out the results
disp("State Sequence: ")
per_line = 80;
pattern = sprintf('.{1,%d}', per_line);
print_str = regexp(string_state_seq, pattern, 'match');
fprintf('%s\n', print_str{:});
% disp(string_state_seq)
State Sequence: a b a b a b b b a b a a b a a b a a a a b a b a a b b a a a b a a b b a a a b a b a a b a b b a b a b b a b a b b b a b b a b b b a a b b a b a b a b b b b a b a a b a b b b b b b a a a b a b a b b a b a b a a b a b b b a b a b b b a b b a a a b b b a b a b b b a b a b a a b a b a b b a b a b a b a b a b b a b b a a b a a b b b a b a b a b b a a b a a b a b a a a b a b b b a b a b b b a b a b a a a
Problem 3b - Simulating a Markov Chain using Monte Carlo
b. Use the output sequence from problem 3a as an input to the code developed in Problem 2 and estimate the transition probability matrix as the sequence length is increased from 21 (i.e., 20 transitions) to 101 or even higher. What do you find?
MATLAB Code: problem_3b.m
Author: Yash Bansod
Date: 26th March, 2020
Problem 3b - Simulating a Markov Chain using Monte Carlo
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
close all;
clc;
Define the input parameters
states = {'a', 'b'}; % Add more states if you want here
% states = {'a', 'b', 'c'}; % Add more states if you want here
num_states = size(states, 2); % N = Number of states
% N x N Transition Matrix
transition_mat = [0.3 0.7; 0.6 0.4];
% transition_mat = [0.3 0.5 0.2; 0.4 0.4 0.2; 0.7 0.15 0.15];
assert(size(transition_mat, 1) == num_states);
assert(size(transition_mat, 2) == num_states);
init_state = 'a';
% num_transitions = 20;
% num_transitions = 200;
num_transitions = 2000;
Monte Carlo Simulation to generate Markov Chain
% Map state names to indices
state_map_ind = containers.Map(states, 1:num_states);
% create a cell array for holding generated state sequence
state_seq = cell(1, num_transitions + 1);
state_seq{1} = init_state;
trans_mat_cumsum = cumsum(transition_mat, 2); % Compute thresholds
assert(all(trans_mat_cumsum(:, end) == 1), "Sum of probabilities != 1")
rand_draw = rand(1, num_transitions); % Random numbers sampled
% Next State is selected based on random draw and computed thresholds
for t_index = 1:num_transitions
state_cumsum = trans_mat_cumsum(state_map_ind(state_seq{t_index}), :);
for s_index = 1:num_states
if rand_draw(t_index) <= state_cumsum(s_index)
state_seq(t_index + 1) = states(s_index);
break;
end
end
end
Calculate the Transition Probability Matrix
transition_count_mat = zeros(num_states, num_states);
for seq_ind = 1:num_transitions
from_state = state_seq{seq_ind};
to_state = state_seq{seq_ind + 1};
from_index = state_map_ind(from_state);
to_index = state_map_ind(to_state);
transition_count_mat(from_index, to_index) = ...
transition_count_mat(from_index, to_index) + 1;
end
assert(sum(transition_count_mat, 'all') == num_transitions);
transition_probability_mat = transition_count_mat ./ ...
sum(transition_count_mat, 2);
transition_probability_table = array2table(transition_probability_mat, ...
'rowNames', states, 'VariableNames' , states);
Print the Results
disp('Transition Probability Table:');
disp(transition_probability_table);
Transition Probability Table:
| a | b | |
| a | 0.31702 | 0.68298 |
| b | 0.60472 | 0.39528 |
Problem 4a - Simulating a Markov Chain using Monte Carlo
Problem Statement:
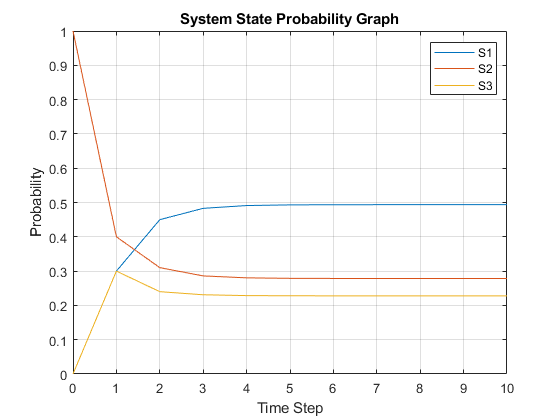
Consider a Markov chain system that is defined by three states (S1, S2, S3). Let Π(k)= {π_i (k)} be the probability state vector for the system after step k. Assume the system starts in S2 and is characterized by the following transition matrix:
| 0.6 | 0.2 | 0.2 |
| 0.3 | 0.4 | 0.3 |
| 0.5 | 0.3 | 0.2 |
Solve the equation analytically for the (exact) Steady State probability state vector.
MATLAB Code: problem_4a.m
Author: Yash Bansod
Date: 26th March, 2020
Problem 4a - Simulating a Markov Chain using Monte Carlo
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
clc;
close all;
Define the input parmeters
num_time_steps = 10; % Number of time steps
state_vec_size = 3;
states = {'S1', 'S2', 'S3'}; % State Labels
assert(size(states, 2) == state_vec_size);
% Construct the state matrix where each row represents the state vector at
% time step = row_index - 1
state_mat = zeros(num_time_steps + 1, state_vec_size);
state_mat(1, :) = [0 1 0]; % Define the initial state vector
% Construct the state transition matrix
transition_mat = [ 0.6 0.2 0.2;
0.3 0.4 0.3;
0.5 0.3 0.2];
Compute the state vector at each time step
for time_step = 2:num_time_steps+1
state_mat(time_step, :) = state_mat(time_step - 1, :) * transition_mat;
end
% Sanity Check
transition_mat_ss = transition_mat^num_time_steps;
state_mat_ss = state_mat(1, :) * transition_mat_ss;
assert(all((state_mat_ss - state_mat(end, :)) < 1e-10));
Plot the results
time_line = 0:num_time_steps;
plot(time_line, state_mat(:, 1));
hold on;
for state_vec_ind = 2:state_vec_size
plot(time_line, state_mat(:, state_vec_ind));
end
hold off;
legend(states);
title('System State Probability Graph');
xlabel('Time Step');
ylabel('Probability');
grid on;
Print the results
disp("Final system state:")
disp(array2table(state_mat(end, :),'VariableNames' , states));
Final system state:
| S1 | S2 | S3 |
| 0.49367 | 0.27848 | 0.22785 |
Problem 4b - Simulating a Markov Chain using Monte Carlo
b. Write a Monte Carlo simulation for this system that will:
i. Plot the cumulative running mean for the fraction of time that the system is found in State 1. ii. Print out the total fraction of time the system spent in each state over the course of the run.
MATLAB Code: problem_4b.m
Author: Yash Bansod
Date: 26th March, 2020
Problem 4b - Simulating a Markov Chain using Monte Carlo
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
clc;
close all;
Define the input parmeters
states = {'S1', 'S2', 'S3'}; % State Labels
num_states = size(states, 2); % N = Number of states
% N x N Transition Matrix
transition_mat = [ 0.6 0.2 0.2;
0.3 0.4 0.3;
0.5 0.3 0.2];
assert(size(transition_mat, 1) == num_states);
assert(size(transition_mat, 2) == num_states);
init_state = 'S2';
num_transitions = 5000;
% Number of steps taken in analytic approach to reach steady state
analytic_ss_steps = 10;
ss_margin = 2; % Steady state margin in percentage
Monte Carlo Simulation to generate Markov Chain
% Map state names to indices
state_map_ind = containers.Map(states, 1:num_states);
% create a cell array for holding generated state sequence
state_seq = cell(1, num_transitions + 1);
state_seq{1} = init_state;
% Construct the state matrix where each row represents the state vector at
% time step = row_index - 1
state_mat = zeros(num_transitions + 1, num_states);
state_mat(1, state_map_ind(init_state)) = 1;
trans_mat_cumsum = cumsum(transition_mat, 2); % Compute thresholds
assert(all(trans_mat_cumsum(:, end) == 1), "Sum of probabilities != 1")
rand_draw = rand(1, num_transitions); % Random numbers sampled
% Next State is selected based on random draw and computed thresholds
for t_index = 1:num_transitions
state_cumsum = trans_mat_cumsum(state_map_ind(state_seq{t_index}), :);
for s_index = 1:num_states
if rand_draw(t_index) <= state_cumsum(s_index)
state_mat(t_index + 1, s_index) = 1;
state_seq(t_index + 1) = states(s_index);
break;
end
end
end
Some computations for analysis
% Compute the CRM
crm_state_mat = cumsum(state_mat, 1);
divisor = 1:num_transitions + 1;
crm_state_mat = crm_state_mat ./ divisor';
% Compute the analytic steady state
transition_mat_ss = transition_mat^analytic_ss_steps;
state_mat_ss = state_mat(1, :) * transition_mat_ss;
Plot the results
% Plot CRM
time_line = 0:num_transitions;
plot(time_line, crm_state_mat(:, 1));
hold on;
for state_vec_ind = 2:num_states
plot(time_line, crm_state_mat(:, state_vec_ind));
end
% Draw Steady State Margins
for state_vec_ind = 1:num_states
yline((1 + (ss_margin/100)) * state_mat_ss(state_vec_ind), '--');
yline((1 - (ss_margin/100)) * state_mat_ss(state_vec_ind), '-.');
end
hold off;
legend(states);
title('State CRM Graph');
xlabel('Time Step');
ylabel('Cumulative Running Mean');
grid on;
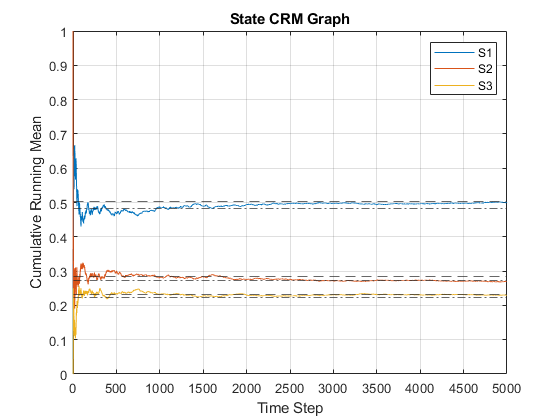
Print the results
disp("Final mean system state:")
disp(array2table(crm_state_mat(end, :),'VariableNames' , states));
Final system state:
| S1 | S2 | S3 |
| 0.4995 | 0.27035 | 0.23015 |
Problem 5 - Simulating a Markov Chain using Monte Carlo
You are presented with a system that has the following states: Ready (R), Operating (O), and Maintenance (M). Assume that over a period of one hour, the probability of going from R->O is 0.5, the probability of going from R->M is 0.1, the probability of going from O->M is 0.3, and the probability of going from M->R is 0.5.

Write a MATLAB Monte Carlo program that will use the following input and provide the following output:
-
Input: Initial State, Transition Probabilities (pij), Number of hours (Nh)
-
Output:
- Probability that the system will be in each state after Nh hours.
- A graph of the cumulative running mean of the probability (frequency) that system will be in each state.
MATLAB Code: problem_5.m
Author: Yash Bansod
Date: 18th April, 2020
Problem 5 - Markov Processes
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
close all;
clc;
Define the input parmeters
states = {'R', 'O', 'M'}; % List the uniques states here
num_states = size(states, 2);
% Define the state transition matrix
transition_mat = [ 0.4 0.5 0.1;
0 0.7 0.3;
0.5 0 0.5];
assert(size(transition_mat, 1) == num_states);
assert(size(transition_mat, 2) == num_states);
init_state = 'R'; % Mark the initial state
num_transitions = 2000; % Define the number of hours
% Provide the analytic steady state for comparison
state_mat_ss = [15/58 25/58 9/29];
ss_margin = 5; % Steady state margin in percentage
Monte Carlo Simulation to generate Markov Chain
% Map state names to indices
state_map_ind = containers.Map(states, 1:num_states);
% create a cell array for holding generated state sequence
state_seq = cell(1, num_transitions + 1);
state_seq{1} = init_state;
% Construct the state matrix where each row represents the state vector at
% time step = row_index - 1
state_mat = zeros(num_transitions + 1, num_states);
state_mat(1, state_map_ind(init_state)) = 1;
trans_mat_cumsum = cumsum(transition_mat, 2); % Compute thresholds
assert(all(trans_mat_cumsum(:, end) == 1), "Sum of probabilities != 1")
rand_draw = rand(1, num_transitions); % Random numbers sampled
% Next State is selected based on random draw and computed thresholds
for t_index = 1:num_transitions
state_cumsum = trans_mat_cumsum(state_map_ind(state_seq{t_index}), :);
for s_index = 1:num_states
if rand_draw(t_index) <= state_cumsum(s_index)
state_mat(t_index + 1, s_index) = 1;
state_seq(t_index + 1) = states(s_index);
break;
end
end
end
Some computations for analysis
% Compute the CRM
crm_state_mat = cumsum(state_mat, 1);
divisor = 1:num_transitions + 1;
crm_state_mat = crm_state_mat ./ divisor';
Plot the results
color_list = {'r', 'b', 'g', 'm', 'c', 'y', 'k'};
legend_arr = cell(num_states, 3);
% Plot CRM
time_line = 0:num_transitions;
state_vec_ind = 1;
plot(time_line, crm_state_mat(:, state_vec_ind), 'Color', ...
color_list{state_vec_ind},'DisplayName', states{state_vec_ind});
hold on;
u_legend = strcat(states(state_vec_ind), ' Upper Margin');
l_legend = strcat(states(state_vec_ind), ' Lower Margin');
yline((1 + (ss_margin/100)) * state_mat_ss(state_vec_ind), '--', ...
'Color', color_list{state_vec_ind}, 'DisplayName', u_legend{1});
yline((1 - (ss_margin/100)) * state_mat_ss(state_vec_ind), '-.', ...
'Color', color_list{state_vec_ind}, 'DisplayName', l_legend{1});
for state_vec_ind = 2:num_states
plot(time_line, crm_state_mat(:, state_vec_ind), 'Color', ...
color_list{state_vec_ind}, 'DisplayName', states{state_vec_ind});
u_legend = strcat(states(state_vec_ind), ' Upper Margin');
l_legend = strcat(states(state_vec_ind), ' Lower Margin');
yline((1 + (ss_margin/100)) * state_mat_ss(state_vec_ind), '--', ...
'Color', color_list{state_vec_ind}, 'DisplayName', u_legend{1});
yline((1 - (ss_margin/100)) * state_mat_ss(state_vec_ind), '-.', ...
'Color', color_list{state_vec_ind}, 'DisplayName', l_legend{1});
end
hold off;
legend
title('State CRM Graph');
xlabel('Time Step');
ylabel('Cumulative Running Mean');
grid on;
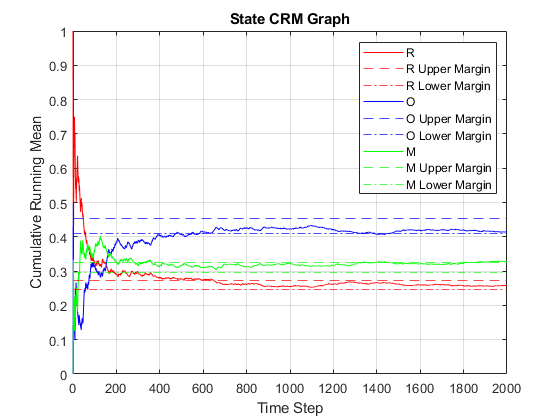
Print the results
disp("Final mean system state:")
disp(array2table(crm_state_mat(end, :),'VariableNames' , states));
Final system state:
| R | O | M |
| 0.25737 | 0.41529 | 0.32734 |