Artificial Intelligence
Problem 1 - Intelligent Agent
Problem Statement:
Develop a MATLAB code for an Intelligent Agent that finds a path from start to goal in a 4-connected grid. Your model agent is required to avoid a set of at least 5 obstacles as it navigates from the start position to your specified goal. Ensure you provide graphical output for agent’s behavior.
MATLAB Code: problem_1.m
Author: Yash Bansod
Date: 22nd April, 2020
Problem 1 - Intelligent Agent
GitHub: https://github.com/YashBansod
Clear the environment and the command line
clear;
close all;
clc;
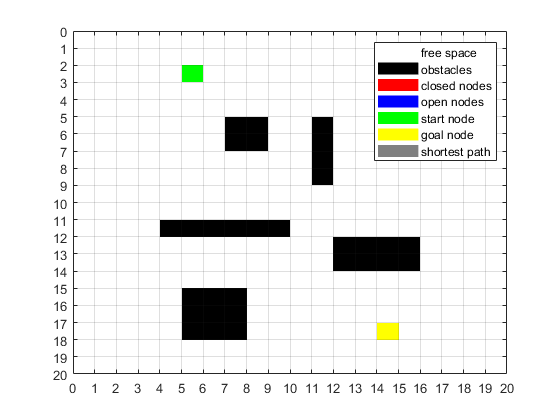
Initialize the maps, color maps, start points and destination points
map_size = [20, 20];
input_map = false(map_size); % Create an Input Map
input_map (6:7, 8:9) = 1; % Add an obstacle
input_map (6:9, 12) = 1; % Add another obstacle
input_map (12, 5:10) = 1; % Add another obstacle
input_map (16:18, 6:8) = 1; % Add another obstacle
input_map (4:6, 17:18) = 1; % Add another obstacle
input_map (13:14, 13:16) = 1; % Add another obstacle
% input_map (13:14, 13:20) = 1; % Add another obstacle
% input_map (15:20, 13:14) = 1; % Add another obstacle
start_coords = [3, 6]; % Save the location of start coordinate
dest_coords = [18, 15]; % Save location of destination coordinate
drawMapEveryTime = true; % To see how nodes expand on the grid
cmap = [1 1 1; % Create a color map
0 0 0;
1 0 0;
0 0 1;
0 1 0;
1 1 0;
0.5 0.5 0.5];
colormap(cmap); % Sets the colormap for the current figure
[nrows, ncols] = size(input_map); % Save the size of the input_map
map = zeros(nrows,ncols); % Create map to save the states of each grid cell
map(~input_map) = 1; % Mark free cells on map
map(input_map) = 2; % Mark obstacle cells on map
start_node = sub2ind(size(map), start_coords(1), start_coords(2)); % Generate linear indices of start node
dest_node = sub2ind(size(map), dest_coords(1), dest_coords(2)); % Generate linear indices of dest node
map(start_node) = 5; % Mark start node on map
map(dest_node) = 6; % Mark destination node on map
distanceFromStart = Inf(nrows,ncols); % Initialize distance from start array to inifinity
distanceFromEnd = Inf(nrows,ncols); % Initialize distance from end array to inifinity
parent = zeros(nrows, ncols); % Create a map for holding parent's index for each grid cell
distanceFromStart(start_node) = 0; % distance of start node from start is zero
distanceFromEnd(dest_node) = 0; % distance of end node from end is zero
% Update the values of all grid pixels for distance from end
[X, Y] = meshgrid(1:ncols, 1:nrows);
xd = dest_coords(1);
yd = dest_coords(2);
distanceFromEnd = abs(X - yd) + abs(Y - xd); % Manhattan Distance
image([0.5, map_size(1)-0.5], [0.5, map_size(2)-0.5], map);
ax = gca;
ax.YTick = 0:1:map_size(1);
ax.XTick = 0:1:map_size(2);
grid on; % Display grid lines
drawnow limitrate nocallbacks; % Update figure
% Add legends to the colormapped image
hold on;
for K = 1:7
hidden_h(K) = surf(zeros(2, 2), 'edgecolor', 'none', ...
'facecolor', cmap(K, :));
end
hold off
uistack(hidden_h, 'bottom');
legend(hidden_h, {'free space', 'obstacles', 'closed nodes', ...
'open nodes', 'start node', 'goal node', 'shortest path'} )
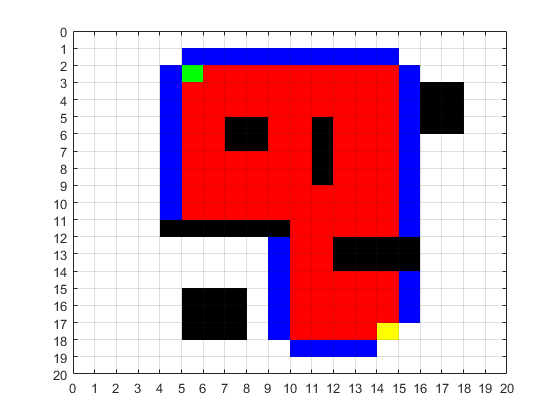
Process the map to update the parent information and distance from start
while true % Create an infinite loop
map(start_node) = 5; % Mark start node on map
map(dest_node) = 6; % Mark destination node on map
if (drawMapEveryTime)
image([0.5, map_size(1)-0.5], [0.5, map_size(2)-0.5], map);
ax = gca;
ax.YTick = 0:1:map_size(1);
ax.XTick = 0:1:map_size(2);
grid on; % Display grid lines
drawnow limitrate nocallbacks; % Update figure
end
% Find the node with the minimum heuristic distance
heuristicDist = distanceFromStart + distanceFromEnd;
[min_dist, current] = min(heuristicDist(:));
% Compute row, column coordinates of current node from linear index
[i, j] = ind2sub(size(heuristicDist), current);
% Create an exit condition for the infinite loop to end
if ((current == dest_node) || isinf(min_dist))
break
end
% Update distance value of element right of current element
if (i+1 <= nrows && distanceFromStart(i+1, j) > distanceFromStart(i,j) + 1)
if (parent(i+1, j) == 0 && input_map(i+1,j)~=1 && parent(current)~= sub2ind(size(map), i+1, j))
distanceFromStart(i+1, j) = distanceFromStart(i,j) + 1;
map(sub2ind(size(map), i+1, j)) = 4; % Mark the neighbour of current as processing
parent(i+1, j)= current;
end
end
% Update distance value of element left of current element
if (i-1 >= 1 && distanceFromStart(i-1, j) > distanceFromStart(i,j) + 1)
if (parent(i-1, j) == 0 && input_map(i-1,j)~=1 && parent(current)~= sub2ind(size(map), i-1, j))
distanceFromStart(i-1, j) = distanceFromStart(i,j) + 1;
map(sub2ind(size(map), i-1, j)) = 4; % Mark the neighbour of current as processing
parent(i-1, j)= current;
end
end
% Update distance value of element top of current element
if (j-1 >= 1 && distanceFromStart(i, j-1) > distanceFromStart(i,j) + 1)
if (parent(i, j-1) == 0 && input_map(i,j-1)~=1 && parent(current)~= sub2ind(size(map), i, j-1))
distanceFromStart(i, j-1) = distanceFromStart(i,j) + 1;
map(sub2ind(size(map), i, j-1)) = 4; % Mark the neighbour of current as processing
parent(i, j-1)= current;
end
end
% Update distance value of element bottom of current element
if (j+1 <= ncols && distanceFromStart(i, j+1) > distanceFromStart(i,j) + 1)
if (parent(i, j+1) == 0 && input_map(i,j+1)~=1 && parent(current)~= sub2ind(size(map), i, j+1))
distanceFromStart(i, j+1) = distanceFromStart(i,j) + 1;
map(sub2ind(size(map), i, j+1)) = 4; % Mark the neighbour of current as processing
parent(i, j+1)= current;
end
end
distanceFromStart(current) = -log(0); % change the distance of current from start as infinity
map(current) = 3; % mark the current point as processed
end
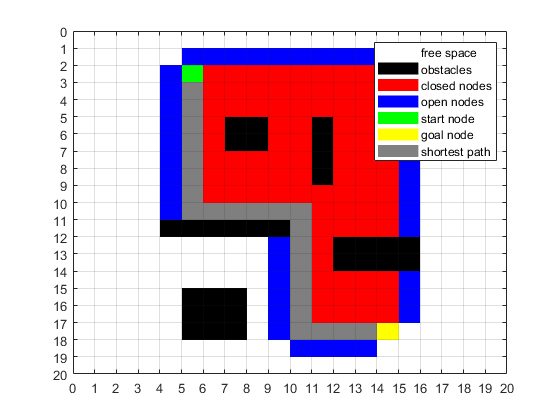
Construct route from start to dest by following the parent links
if (isinf(distanceFromStart(dest_node)))
route = []; % if distance to destination node is infinity
else
route = [dest_node]; % else backtrace the route from destination node
while (parent(route(1)) ~= 0) % check front of route for start node
route = [parent(route(1)), route]; % add parent of current node to front of route
end
for k = 2:length(route) - 1 % To visualize the map and the path
map(route(k)) = 7;
pause(0.001); % Pause the code for a while
image([0.5, map_size(1)-0.5], [0.5, map_size(2)-0.5], map);
ax = gca;
ax.YTick = 0:1:map_size(1);
ax.XTick = 0:1:map_size(2);
grid on; % Display grid lines
drawnow limitrate nocallbacks; % Update figure
end
end
% Add legends to the colormapped image
hold on;
for K = 1:7
hidden_h(K) = surf(zeros(2, 2), 'edgecolor', 'none', ...
'facecolor', cmap(K, :));
end
hold off
uistack(hidden_h, 'bottom');
legend(hidden_h, {'free space', 'obstacles', 'closed nodes', ...
'open nodes', 'start node', 'goal node', 'shortest path'} )