Q_learning
Important Links
Google Drive: https://drive.google.com/drive/folders/10fpWJJ92SCjZ-gV1rOac0aVbyJg_O_dH?usp=sharing
Repository: https://github.com/YashBansod/CMSC_818B_Decision_Making_in_Robotics/Q_learning
Some key highlights about the source code:
- The source code in this project is 100 % PEP-8 compliant.
Run Instructions
- Open the terminal.
- If you are accessing this project from github, clone it onto your system.
git clone https://github.com/YashBansod/CMSC_818B_Q_learning - Download the saved_models folder from the google drive link and place the folder in this project’s directory.
- If you have a python virtual environment, activate it. Else you will be using the system default python environment.
- In the terminal, browse to the directory containing this project.
- Install the requirements of this project.
pip install -r requirements.txt - Run the problem1_sol.py as python file.
python problem1_sol.py -t -v -d
Note: Run the help option of the python file to see all argument options. python problem1_sol.py -h
Note: You may have to add the project directory to the PATH environment variable.
For linux:
export PYTHONPATH=$PYTHONPATH:<absolute path to project directory>
For windows:
set PYTHONPATH=%PYTHONPATH%;<absolute path to project directory>
Developed on:
- Windows 10 (version 1903)
- Pycharm Professional 2019.2
- Python 3.7.3
Note: I have written the code keeping in mind about the back compatibility with Python 2.7. However, I have tested it on Python 3.7.3 only. If you find any difficulties in executing the code on any other version, try using a virtual interpreter of python 3.7.3 or report the error to me for resolution.
Results
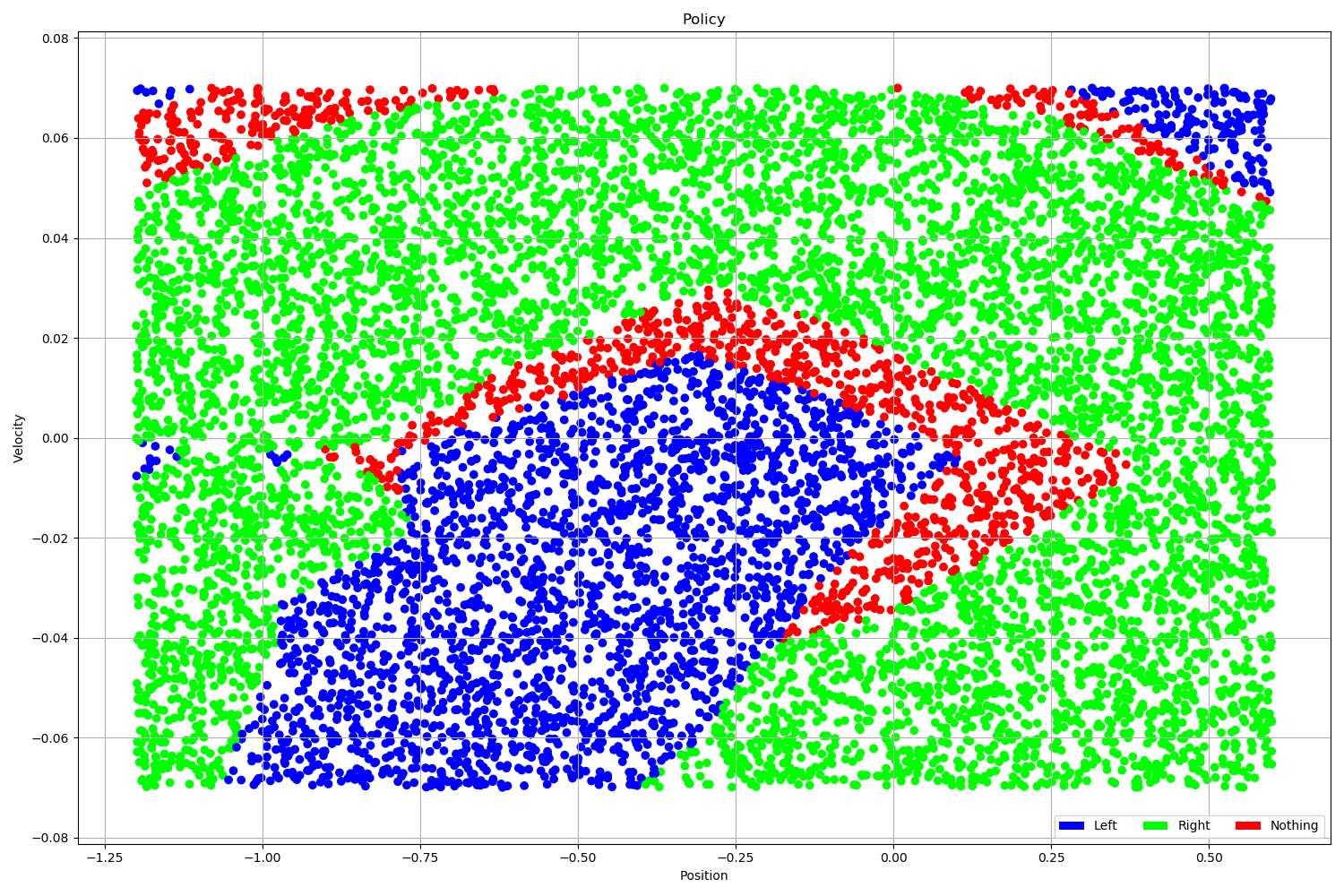
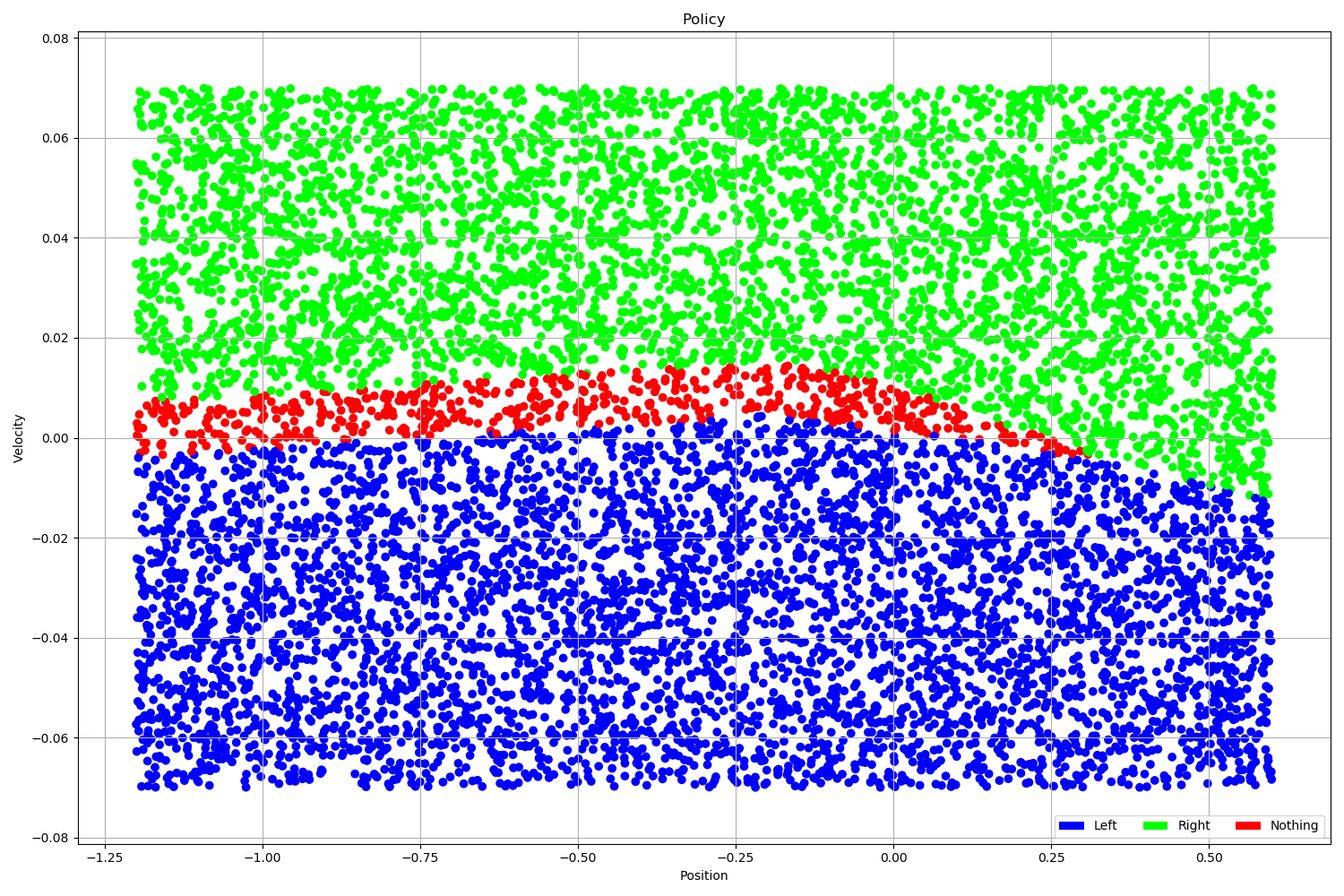
Solved Mountain Car Problem:
Policy Visualization for Problem 1 (Unmodified Reward) (Experiment 2 in writeup):
Policy Visualization for Problem 1 (Unmodified Reward) (Experiment 1 in writeup):
Author: Yash Bansod
UID: 116776547
E-mail: yashb@umd.edu
Organization: University of Maryland, College Park